Collaborations:
Farah Chehade (Université de technologie de Troyes)
Hichem Snoussi (Université de technologie de Troyes)
Joumana Farah (Professor, Lebanese University, Lebanon)
Daniel ElShamaa (PhD student, 2015-2018)
Sandy Mahfouz (PhD student, 2012-2015, now Assistant Professor)
Mehdi Essoloh (PhD student, 2006-2009, now at DGA)
Keywords:
Localization without GPS, distributed optimization, RSSI
Related Works:
see also Collaborative Learning in (Wireless) Sensor Networks
Main Contributions
With recent technological advances in both electronics and wireless communications, low-power and low-cost tiny sensors have been developed for monitoring physical phenomena and tracking applications. Deployed in the inspected environment with efficiently designed distributed algorithms, wireless ad hoc networks seem to offer several opportunities. They were successfully employed in many situations, ranging from military applications such as battleground supervision to civilian applications such as habitat monitoring and health-care surveillance. These sensors can be either randomly deployed, such as for monitoring inhospitable habitats and disaster areas, or equipping mobile entities, such as humans (e.g., Alzheimer patients in an adult daycare center) or animals in wilderness or even vehicles (in vehicular ad hoc networks (VANET)).
Information captured by each sensor remains obsolete as long as it stays unaware of its location. Implementing a self-localization device, such as a global positioning system (GPS) receiver, at each sensor device may be too expensive and too power-hungry for the desired application with battery-powered devices. Moreover, GPS or any global navigation satellite system (GNSS), are not functional in indoor environments. As a consequence, only a small fraction of the sensors may be location aware, the so-called anchors or beacons. The other sensors have to estimate their locations by exchanging some information with its neighbors.
For this purpose, each sensor determines a ranging with other sensors, from inter-sensor measurements such as the received signal strength indication (RSSI), the connectivity, the hop count, and the time difference of arrival. Identifying a function that links the ranging between sensors to their locations is a hard and ill-posed optimization problem. Prior to our work, state-of-the-art localization techniques have been often based on multidimensional scaling (MDS) or semidefinite programming. However, such linear techniques fail to accurately estimate the locations, since inter-sensor data are highly nonlinear with respect to the distance information, due to multipath propagation and wall attenuation.
We have been working on this hard problem for more than 10 years. Our main contributions are described in the following, chronologically from newer to older, with some selected publications.
- Zoning-based Localization in Indoor Environments (2015-2020)
- Localization and Tracking in Indoor Environments using Radio-location Fingerprints (2012-2016)
- Tracking by Combining Kernel-based Machine Learning and a (Bayesian) Variational Method (2010-2014)
- Localization with Polar Intervals (2012-2013)
- Localization as a Pre-image Problem in Kernel-based Machine Learning (2007-2011)
Zoning-based Localization in Indoor Environments using Belief Functions Theory (2015-2020)
(Work of PhD Student Daniel AlShamaa)
This research activity aims to find the zone where a tracked sensor node resides, in an indoor environment. This issue is important for health-care applications for instance, where Alzheimer’s patients might be lost in their nursing home and where locating them in a specific zone is completely sufficient.
Of particular interest are WiFi signals, since one can rely only on the Access Points present inside the building, without any additional hardware. The localization issue consists in finding the location of a sensor node according to the WiFi signals that it collects from the Access Points. A major issue is the absence of a valid pathloss model, especially in indoor environments. To overcome this issue, techniques that employ radio-location fingerprinting have been proposed (See work of PhD Student Sandy Mahfouz, given below). They consist of collecting a database of exact reference locations, coupled to their corresponding WiFi signals strengths, received from the Access Points.
The disadvantage of exact localization algorithms using radio-location fingerprinting is their need to a database with exact locations, whose construction is time-costly and complex. We consider the zoning problem without computing exact locations. To this end, the WiFi signal strengths are periodically collected while the user is moving inside the building, while having in memory the zone (room) where the signals are collected. In the work referenced below, zoning-based localization techniques are presented by investigating belief functions theory to combine evidence revealed at each Access Point.
Main Journal Papers
Daniel AlShamaa, Farah Mourad-Chehade, Paul Honeine and Aly Chkeir
Fusion of multiple mobility and observation models for indoor zoning-based sensor tracking.
IEEE Transactions on Aerospace and Electronic Systems, 56(6):4315–4326, Dec. 2020.
Daniel AlShamaa, Farah Mourad-Chehade, Paul Honeine and Aly Chkeir
An evidential framework for localization of sensors in indoor environments.
Sensors, 20(1):318, Jan. 2020.
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Decentralized kernel-based localization in wireless sensor networks using belief functions.
IEEE Sensors Journal, 19(11):4149–4159, June 2019.
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
A Hierarchical Classification Method Using Belief Functions.
Signal Processing, 148 , pp. 68 – 77, July, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Tracking of Mobile Sensors Using Belief Functions in Indoor Wireless Networks.
IEEE Sensors Journal, 18 (1) , pp. 310-319, January, 2018
Main International Conference Papers
Daniel AlShamaa, Aly Chkeir, Farah Mourad-Chehade and Paul Honeine
A hidden markov model for indoor trajectory tracking of elderly people.
In Proc. 14th IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11 – 13 Mar. 2019.
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
The Belief Functions Theory for Sensors Localization in Indoor Wireless Networks.
Proc. 5th International Conference on Belief Functions (BELIEF 2018): Belief Functions: Theory and Applications (BELIEF), Destercke, Sébastien and Denoeux, Thierry and Cuzzolin, Fabio and Martin, Arnaud (Eds.), Springer International Publishing, Compiègne, France, pp. 10–13, 17 – 21 September, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Decentralized Sensor Localization by Decision Fusion of RSSI and Mobility in Indoor Environments.
Proc. 25rd European Conference on Signal Processing (EUSIPCO), Rome, Italy, pp. 2300-2304, 3 – 7 September, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Localization of Sensors in Indoor Wireless Networks: An Observation Model Using WiFi RSS.
Proc. 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26 – 28 February, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Mobility-based Tracking Using WiFi RSS in Indoor Wireless Sensor Networks.
Proc. 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26 – 28 February, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
A Weighted Kernel-based Hierarchical Classification Method for Zoning of Sensors in Indoor Wireless Networks.
Proc. 19th IEEE International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25 – 28 June, 2018
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Zoning-based Localization in Indoor Sensor Networks Using Belief Functions Theory.
Proc. 17th IEEE International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Edinburgh, UK, 3-6 July, 2016
Other papers
Daniel AlShamaa, Aly Chkeir, Farah Mourad-Chehade, and Paul Honeine
A Hidden Markov Model for Indoor Trajectory Tracking of Elderly People.
Proc. 14th IEEE Sensors Applications Symposium (SAS), Sophia Antipolis, France, 11 – 13 March, 2019
Daniel AlShamaa, Farah Mourad-Chehade, and Paul Honeine
Classification paramétrique multi-classes à croyance.
Actes du 26-ème Colloque GRETSI sur le Traitement du Signal et des Images (GRETSI’17), Juan-Les-Pins, France, 5 – 6 September, 2017
Localization and Tracking in Indoor Environments using Radio-location Fingerprints (2012-2016)
(Work of PhD Student Sandy Mahfouz)
This work investigates the radio-location fingerprinting technique for localization using received signal strength indicators (RSSI). Localization techniques based on radio fingerprinting are more reliable than connectivity-based ones because they do not make any assumption on the communications in the network. However, they need a pre-configuration phase where a collection of fingerprints is performed to model the network, leading to a database of fingerprints, i.e., a radio map. In the localization phase, RSSI measures collected by any given node are combined with information from the fingerprints database in order to locate the considered node. The advantage of fingerprinting-based techniques is that gathering information from the network allows us to take into account many characteristics of the environment such as multipath propagation, wall attenuation…
We have proposed several original contributions for radio-location fingerprinting, essentially by investigating kernel-based machine learning. Contributions include:
Modeling of RSSI signals in the presence of multipath propagation and wall attenuation
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Non-parametric and semi-parametric RSSI/distance modeling for target tracking in wireless sensor networks.
IEEE sensors journal, 16 (7), 2115-2126, April, 2016
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Combining a physical model with a nonlinear fluctuation for signal propagation modeling in WSNs.
Proc. 11th ACS/IEEE International Conference on Computer Systems and Applications (AICCSA), Doha, Qatar, 10-13 Nov., 2014
Localization using radio-location fingerprints by investigating kernel-based machine learning
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Kernel-based machine learning using radio-fingerprints for localization in WSNs.
IEEE Transactions on Aerospace and Electronic Systems, 51 (2), 1324-1336, April, 2015
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Decentralized Localization Using Fingerprinting and Kernel Methods in Wireless Sensor Networks.
Proc. 21th European Conference on Signal Processing (EUSIPCO), Marrakech, Morocco, 9-13 Sept., 2013
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Kernel-based localization using fingerprinting in wireless sensor networks.
Proc. 14th IEEE Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Darmstadt, Germany, pp. 744-748, 16-19 June, 2013
Target tracking with the acceleration information using the Kalman & particle filters
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Target tracking using machine learning and Kalman filter in wireless sensor networks.
IEEE Sensors Journal, 14 (10), 3715-3725, Oct., 2014
Sandy Mahfouz, Farah Mourad-Chehade, Paul Honeine, Joumana Farah, and Hichem Snoussi
Ridge regression and Kalman filtering for target tracking in wireless sensor networks.
Proc. eighth IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), A Coruña, Spain, 22-25 June, 2014
Tracking by Combining Kernel-based Machine Learning and a (Bayesian) Variational Method (2010-2014)
(Joint work with Hichem Snoussi and Cédric Richard)
This work studies the distributed localization problem of moving targets in a wireless sensor network, accommodating energy constraints and limited power of embedded sensors. We propose localization techniques that take advantage of both the consistency of the Bayesian approach and the robustness of kernel-based machine learning. These techniques rely on an online variational filter incorporating a learning phase of the likelihood function. This learning phase makes this localization approach particularly robust and flexible in an unknown and non stationary environment.
Hichem Snoussi, Paul Honeine, and Cédric Richard
Kernel variational approach for target tracking in a wireless sensor network.
Regularization and bayesian methods for inverse problems in signal and image processing, Jean-François Giovannelli and Jérôme Idier (Eds.). Digital signal and image processing series, Wiley-ISTE (ISBN: 978-1-84821-637-2), pp. 251-265, Feb., 2015
Hichem Snoussi, Paul Honeine, and Cédric Richard
Approche variationnelle à noyau pour le suivi de cibles dans un réseau de capteurs sans fil.
Méthodes d’inversion appliquées au traitement du signal et de l’image, Jean-François Giovannelli and Jérôme Idier (Eds.), Hermes, 273-288, Dec, 2013
Hichem Snoussi, Cédric Richard, and Paul Honeine
System and method for locating a target using a transceiver array (fr: Système et procédé de localisation de cible par un réseau d’émetteurs/récepteurs).
Patent, 2010
Localization with Polar Intervals (2012-2013)
(Joint Work with Farah Mourad-Chehade)
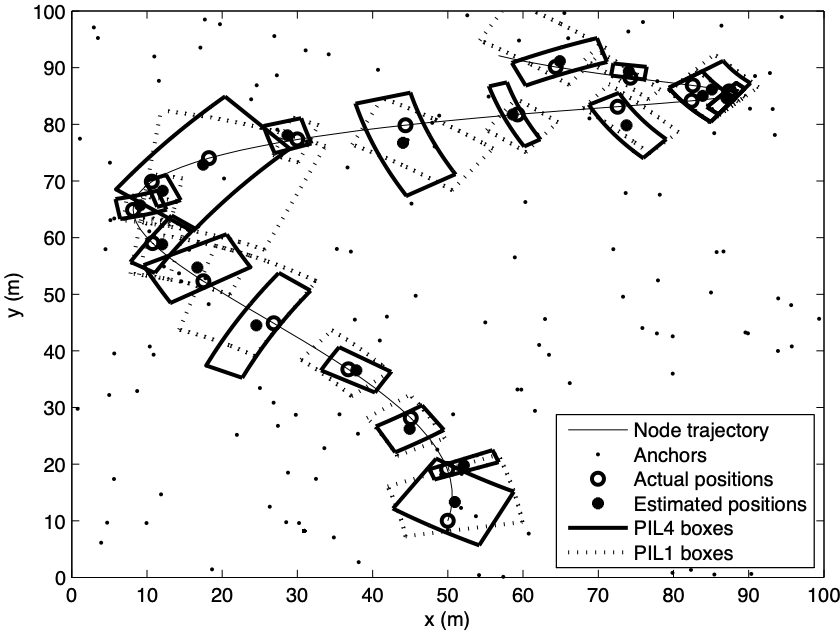
This work considers the problem of localization in uncontrolled mobility sensor networks. Based on connectivity measurements the problem is solved using polar intervals. Computation is performed, in several polar coordinate systems, using both polar coordinates and interval analysis. Position estimates are thus partial rings enclosing the exact solution of the problem. Simulation results corroborate the efficiency of the proposed method compared with existing methods, especially with those handling single coordinate systems.
Farah Mourad-Chehade, Paul Honeine and Hichem Snoussi
Polar interval-based localization in mobile sensor networks.
IEEE Transactions on Aerospace and Electronic Systems, 49 (4), 2310-2322, Oct., 2013
Farah Mourad-Chehade, Paul Honeine, and Hichem Snoussi
Indoor localization using polar intervals in wireless sensor networks.
Proc. 19th International Conference on Telecommunications (ICT), Jounieh, Lebanon, pp.1-6, 23 – 25 April, 2012
Localization as a Pre-image Problem in Kernel-based Machine Learning (2007-2011)
Paul Honeine and Cédric Richard
Preimage problem in kernel-based machine learning.
IEEE Signal Processing Magazine, 28 (2), 77-88, March, 2011
Paul Honeine, Cédric Richard, and Hichem Snoussi
Auto-localisation dans les réseaux de capteurs sans fil par régression de matrices de Gram.
Actes du 22-ème Colloque GRETSI sur le Traitement du Signal et des Images, Dijon, France, Sept., 2009
Mehdi Essoloh, Cédric Richard, Hichem Snoussi, and Paul Honeine
Distributed localization in wireless sensor networks as a pre-image problem in a reproducing kernel Hilbert space.
Proc. 16th European Conference on Signal Processing (EUSIPCO), Lausanne, Switzerland, pp. 1-5, Aug. 2008
Paul Honeine, Cédric Richard, Mehdi Essoloh, and Hichem Snoussi
Localization in sensor networks – A matrix regression approach.
Proc. 5th IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Darmstadt, Germany, pp. 284-287, July 2008